几何基础模型赋能机器人操控
推荐指数 69.0 NO. 018 · 2026.06.17
upvotes84comments2
为什么值得看
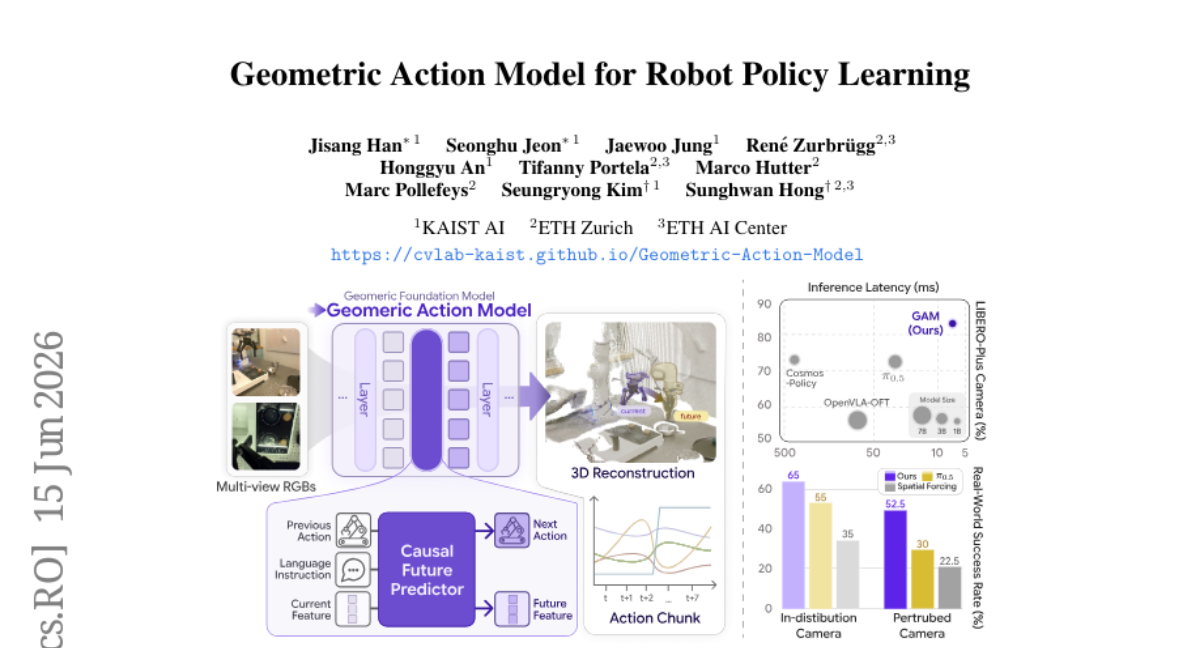
提出几何动作模型(Geometric Action Model),利用预训练几何基础模型实现语言条件下的3D机器人操作策略。相比现有VLA和WAM方法,显式建模3D物理交互可提升操控精度与鲁棒性,对具身智能工程化有直接参考价值。
媒体预览
编辑判断
这篇论文的关键区别在于它不跟RT-2、OpenVLA等主流VLA卷端到端数据规模,而是把3D几何理解拆成独立模块复用预训练权重。这意味着小团队可以用更少机器人数据达到相近效果,算力门槛明显降低。
但需要注意:几何基础模型的预训练数据质量和领域覆盖度直接决定下游操控上限,目前这类模型在开放词汇物体上的泛化仍不稳定。论文若未开源几何模型权重,复现难度会很高,建议先确认代码完整度再决定是否跟进。